If you have a Samyang lens for your camera you may find that the lens stops working after a camera firmware update. That’s what happened to me when I updated my A7RV to the version 4.0 firmware.
I do a lot of street photography with the Samyang 24mm f/2.8 and I noticed I was missing lots of shots. Photos that should have been easy, with a clear subject and face visible for the camera to focus on were entirely out of focus. It seemed to happen more often when I was shooting from the hip, and then it seemed the camera wouldn’t take a photo at all.
I thought it might be some auto focus setting on my camera. I played around with settings attempting to fix it, but nothing worked.
Eventually, I figured out it was the camera firmware update. Sony’s new firmware changed something in how the auto focus information is transmitted from lens to camera. My Sony lenses worked fine but not the Samyang ones. There had been Samyang firmware updates in January for the A7M5. My camera firmware came out in December but I hadn’t updated it until about a month ago.
I bought the Samyang Lens Station. The Amazon websites around Europe didn’t have it in stock, but amazon.ie did, shipped from Spain. It was only after that I remembered to check MPB and found it there at a much cheaper price. I guess these things don’t have much use once your lens is working ok again.
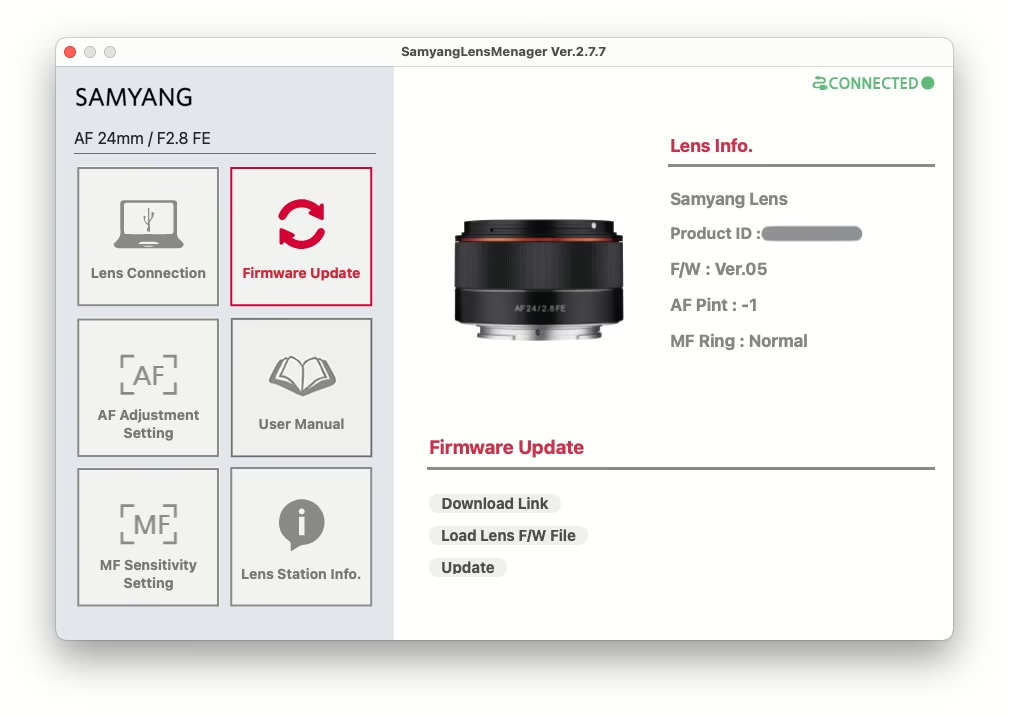
You’ll need to download the Lens Manager app. The interface is simple, and updating the lens is easy enough, if not obvious. Once you seat the lens on the lens station you’ll see a screen like this:
The “Download Link” goes to a website that doesn’t load but you can grab the firmware files from here, their current site. A .hex file is extracted from the downloaded zip file and that’s the “Lens F/W File” that you load. Click “Update” and the lens will be updated in about 60 seconds or so.
The 24mm lens went from version 5 to version 9, my 75mm f/1.8 lens went from version 1 to version 7.
Once I’d updated I tried out the lenses and all was good again. Yay!
I want to explore the AF/MF settings in the programme too and see what that’ll do but my priority was getting the lens working.
Do I love the Samyang 24mm f/2.8? Why yes. I have 33,409 images shot with it. Most of those are probably rubbish as it’s my street photography lens of choice but it’s worked really well until now. You can see a selection of my best photos here.
One year ago today I published a post about 20 years at Automattic, so it follows that I’ll post this one today, with 17 minutes left in the day.
AI is still disrupting our industry, and tech companies that are rolling in money are laying off thousands of developers. I don’t know what’s coming next, except that it will come one day at a time.
I’ve seen that clip a few times (you might need subtitles), but what was new to me was this clip from his show Conan O’Brien Must Go. He refers to this scene in the Andrew Scott interview above.
The show is billed as “Paul Young – From No Parlez to The Secret Of Association” and described as follows,
Paul Young looks back during these intimate shows, that combine conversation and acoustic versions of songs
Paul Young broke into the big time 40 years ago when No Parlez went to number one and spawned iconic hits like Wherever I Lay My Hat (That’s My Home). More success followed with the number one album The Secret Of Association and the worldwide hit Everytime You Go Away, not forgetting an appearance at Live Aid and more. Paul sustained that success – while having fun in his tex-mex band, Los Pacaminos. Now, he’s looking back during these intimate shows, that combine conversation and acoustic versions of songs. Paul’s meeting fans, singing songs, and telling stories about his incredible career. It’s time to revel in the classic hits and learn the stories behind them in this intimate show.
It’s a description that, judging by the reaction in the room, almost nobody had read. I hadn’t either, in fairness. But when it turned into more of a guided tour through the back catalogue than a straight-up gig, a few people in the audience got restless. There was heckling. There was talking. From row five I could still catch most of what was being said on stage, but further back, I suspect the experience was a different one entirely. Having said that, some of the worst heckling came from the benches in front.
Paul’s voice isn’t what it once was. He’s been open about damaging it early in his career, but the stories more than carried the night. The standout for me was his recollection of singing Radio Ga Ga at the Freddie Mercury tribute concert at Wembley in 1992. He talked about looking up and seeing that vast crowd clapping in unison. He was grateful that camera technology had moved on enough by then to put a camera behind him so the people watching at home could see what he was seeing. I’m paraphrasing, but the line that stuck with me was him saying how amazing it was “to be Freddie Mercury for five minutes”.
It was funny them suggesting that Roger Taylor was off-stage playing the drums. Before the show started we remarked how similar Paul Young in his advertising poster looked to Roger Taylor.
Go in with the right expectations. This isn’t ninety minutes of non-stop hits. It’s stories, memories, and a handful of songs, hosted by Paul and his old friend Jamie Moses, whose rapport is genuinely lovely to watch. Treat it like an evening in someone’s front room rather than a concert, and you’ll have a good time.
I’ve just released Media Picker for Immich on the WordPress.org plugin directory. It connects WordPress to a self-hosted Immich server so you can browse, search, and insert your photos and videos into posts without copying files around.
Immich
I run Immich at home. It’s where my photos now live. They’re organised, searchable, with facial recognition and AI search. My WordPress uploads directory is where photos used to go, and the two never talked to each other. This plugin fixes that.
How it works
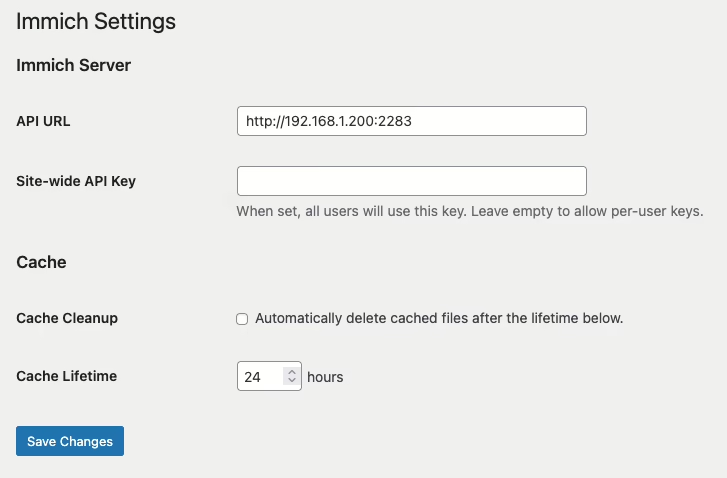
Point the plugin at your Immich server and give it an API key. You can set a site-wide key or let each user configure their own to connect to their own Immich account.
If the site-wide key is blank, each user adds their own key on their profile page. All Immich API calls happen server-side.
Two ways to add media
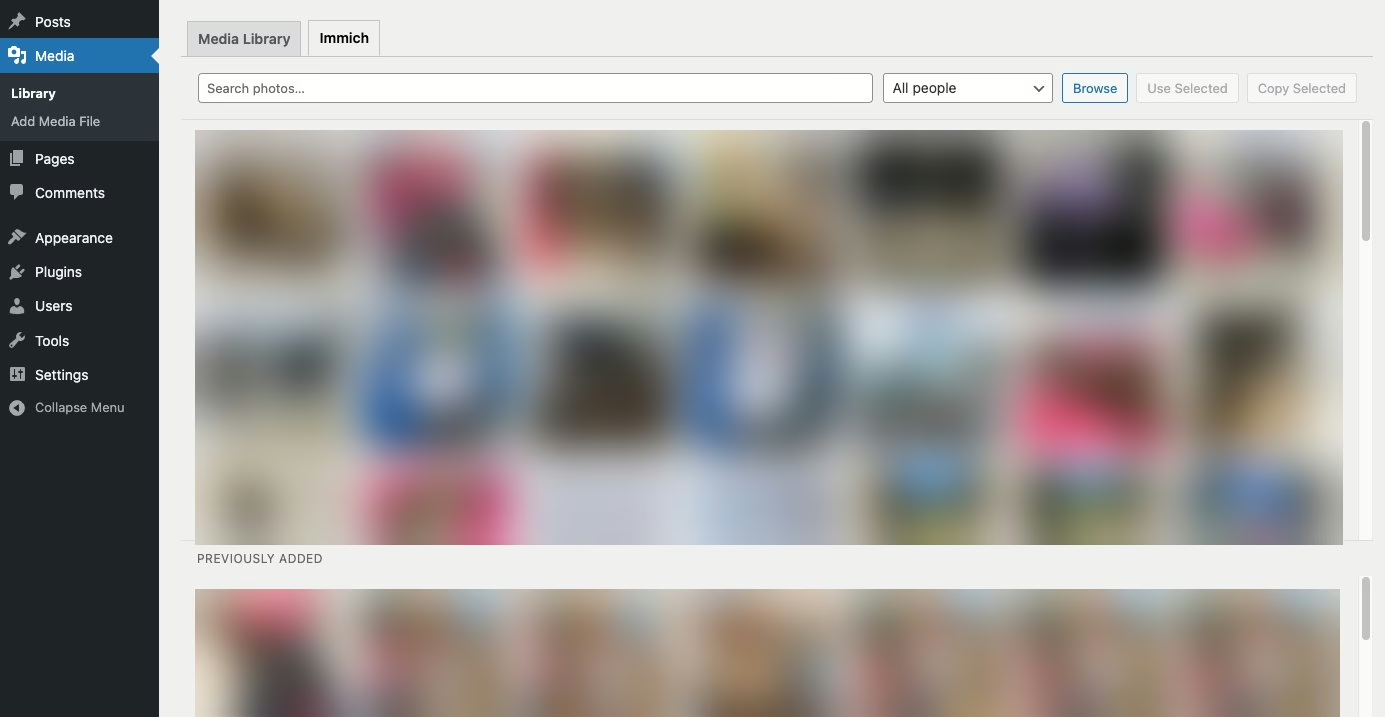
Once configured, an Immich tab appears in two places.
The first is the Media Library grid. Switch to the Immich view and you can search, filter by person, and either Use or Copy assets into WordPress.
Use creates a virtual attachment. Nothing is copied; WordPress proxies the media from Immich on demand and caches it locally on first request. Your uploads directory stays lean.
Copy downloads the original file into wp-content/uploads/ as a normal attachment.
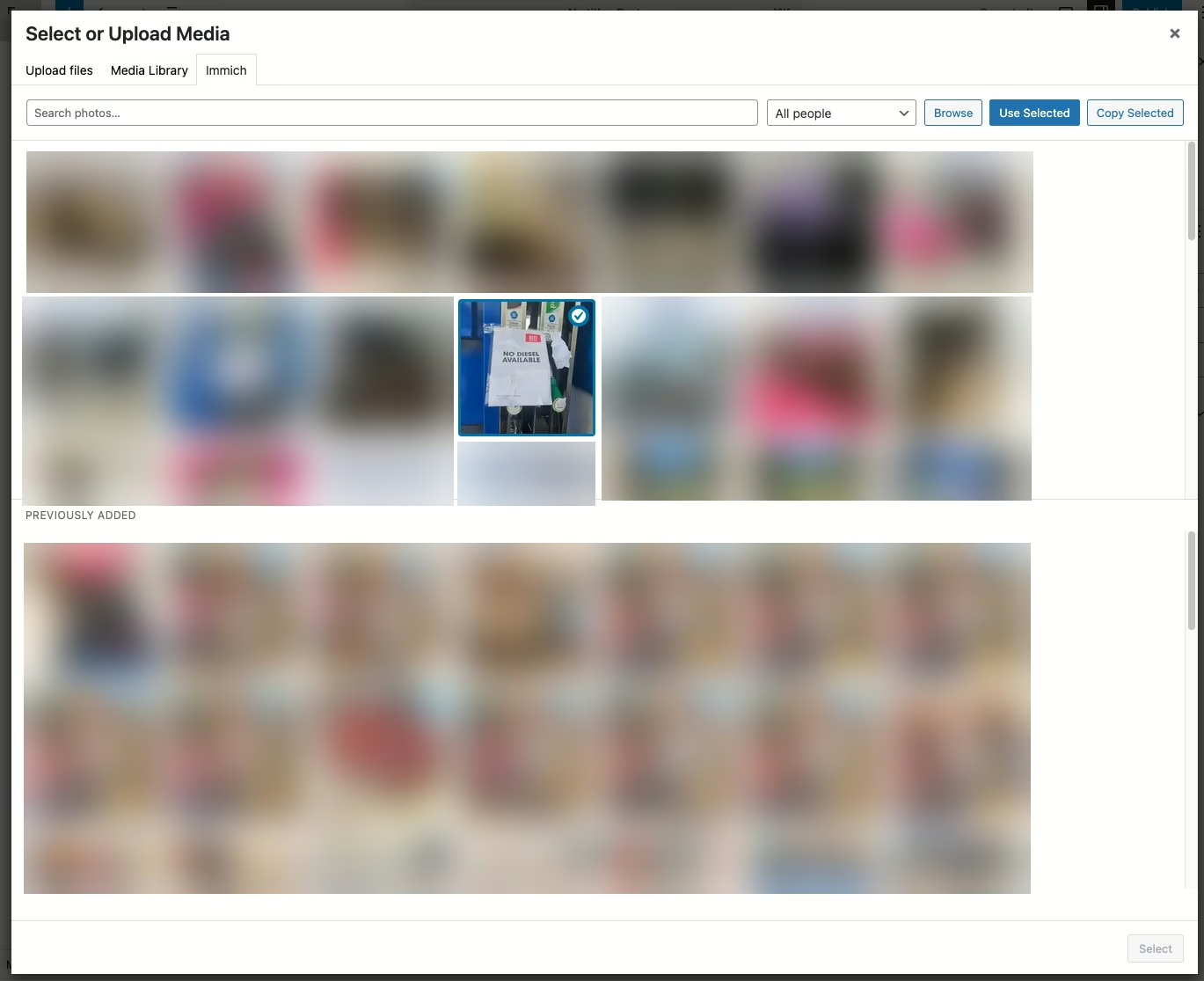
The same tab shows up in the “Select or Upload Media” dialog inside the post editor, so you can pull an Immich photo straight into a post without leaving the editor.
A few details worth mentioning
Videos work too. Proxied videos stream with seek support.
Lightbox. Proxied Immich images in posts open a full-resolution lightbox on click.
Local cache. Proxied media is cached to wp-content/cache/immich/ after the first fetch. Optional cleanup with a configurable lifetime.
Your server stays private. Immich only needs to be reachable from WordPress — not from the public internet. Visitors never connect to Immich directly.
When images are copied over, virtually or otherwise, you can insert them into a post like any other image, which also includes adding them to galleries in posts.
Get it
Install it from the WordPress plugin directory or search for “media picker for Immich” in the plugins page in WordPress.
Feedback and bug reports are welcome. Development is done on GitHub here.
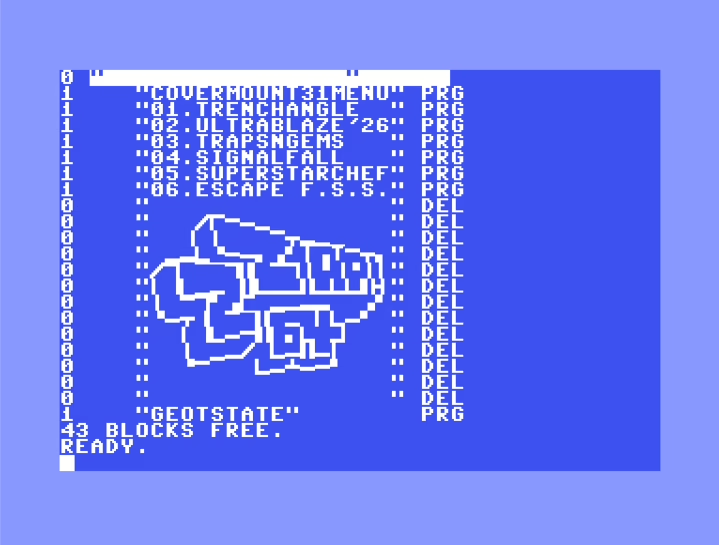
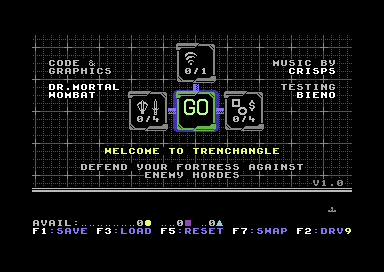
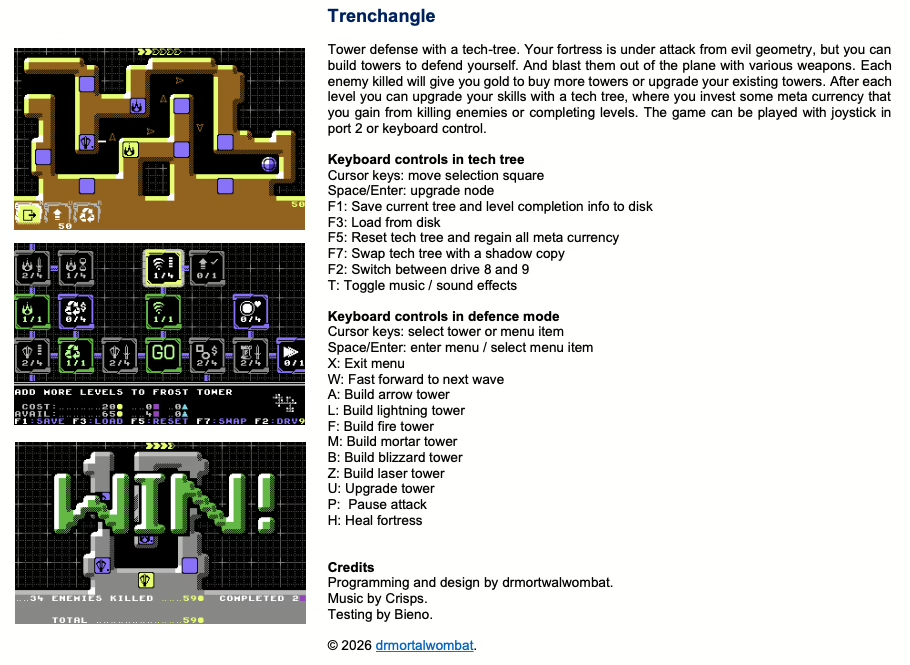
I picked up Issue 31 of Zzap! 64 yesterday evening and had a quick look at the covermount disk. There’s a few really good-looking games there but one that caught my eye was Trenchangle, a tower defense game!
I’m a sucker for the genre, but it took me several tries to even finish level one. I should have added arrows to the arrow tower instead of expanding the tech tree available. Lesson learned.
The game doesn’t require a joystick, and it’s possibly easier to play in an emulator because you can use the cursor keys to navigate. I couldn’t see anywhere to redefine keys so that joystick might make it easier to play on a real machine.
Game progress can be saved and reset, which means I’ll definitely be coming back to this game for quick plays. It looks like it saves in a file called “GEOTSTATE”, which wasn’t there when I first opened the D64 file so it can be deleted.
There is a cracked and trained copy on CSDB, but this is a brand new C64 game. Support the developer and pay what you want on their itch.io page.
This ancient post about using Cyanogenmod on the Galaxy S2 has been reported for copyright infringement to Google. Along with dozens of porn sites. I didn’t know Cyanogenmod was just a hot topic!
Anyway, I’m not going to do anything about it, but I just wanted to mark the occasion.
DolphinDOS 2 is a replacement ROM for the Commodore 64 and its 1541 floppy disk drive that dramatically speeds up disk access by using a parallel cable between the two machines. Instead of the glacial CBM serial bus, data transfers happen byte-at-a-time over an 8-bit parallel port, making loads roughly 25x faster. I’ve been maintaining a custom version for myself. It changes the keys used to list the contents of disks and load programmes to match the Action Replay that I’m more familiar with.
While I blogged about buying a real Commodore 64 in 2019, I didn’t post about buying an Ultimate 64 a few months later. The version I have is the non-Elite version but it’s quite a wonderful device. Unfortunately, life got in the way and the machine lay mostly unused for years. I must make a post about that little beauty one of these days. Anyway …
I just released version 1.2 of my DolphinDOS 2 project, and there’s a bug fix for a seemingly rare problem: a bug in the original DolphinDOS 2 ROM from the late 1980s that almost certainly never manifested on real hardware. It seems so rare I’ve never read of anyone complaining about it on any C64-related Facebook group until this bug report surfaced. The parallel port would randomly be switched off when a C64 Ultimate was switched on!
It was never my intention to go diving into the assembly of this project. I just wanted to change some keys around, but I had Claude Code look at it, with the relevant sections of the C64 Programmer’s Guide at hand for reference. I honestly don’t have time to fix a rare bug like this, but Claude did. Here’s what it said about the bug. I would be interested in hearing what C64 developers who have looked at the RAM in a real 1541 have to say.
The 1541 drive ROM uses four flag bytes at $6000–$6003 in drive RAM to control DolphinDOS features: R (read), F (fast format), V (verify), and P (parallel port). A value of $12 means disabled; anything else means enabled. The original ROM never initialises these flags at boot. It relies on whatever happens to be in RAM when the drive powers on.
On a real 1541 with SRAM, that RAM almost always powers up as zeroes — so $6003 is never $12, and the parallel port is always enabled. It just works accidentally.
On the C64 Ultimate, the emulated 1541 RAM isn’t zeroed so predictably. Sometimes $6003 powers up containing $12, and the parallel port silently disables itself. A user reported that their C64 Ultimate was randomly booting with the parallel port off. That’s something that would never happen on the original hardware.
The fix was simple enough, set the important memory locations to zero, although it took a couple of tries before it worked.
The fix adds a small init routine at the end of the 1541 ROM’s free space that zeroes $6000–$6003 and sets the track interleave at $6023 during the drive’s boot sequence. The tricky part was that the 1541 ROM has a checksum that the drive verifies on startup. If it doesn’t match, the drive refuses to boot. The new jump target was chosen so its address bytes sum to the same value as the original, keeping the checksum valid without needing a separate compensation byte.
Claude Code did the analysis and wrote the patch. I pointed it at the disassembly and the bug report, and it identified the uninitialised RAM as the root cause, found free space in the ROM, worked out the checksum constraint, and produced a working fix. The reporter tested it on their C64 Ultimate and confirmed it resolved the issue. I tested it in Vice and on my Ultimate64.
Tapping F1 now auto-runs after loading: previously F1 loaded the first program from disk but left you at the READY prompt. Now it executes RUN automatically.
Cursor colour changed from cyan to white matching the look of the Action Replay I’m used to.
kernal.asm is now compilable. I converted it to ACME assembler format, so you can modify and rebuild the C64 kernal ROM from source.
Install instructions updated for the latest Ultimate64 firmware (which seems to match the C64 Ultimate instructions I found online).
The release is on GitHub. If you’re running DolphinDOS 2 on an Ultimate64 or C64 Ultimate, it’s worth updating.
You can also find the original kernal files here, along with different versions of them. My 1541.rom is based on the c1541-20-6.rom found there. My kernal.rom is based on kernal-20-2.rom. There is a third revision of that kernal rom too. I asked Claude to tell me what was different between them:
kernal-20-2 vs kernal-20-3: What’s different
The code is functionally almost identical. The 911 byte differences break down into a few categories:
The version byte at $FF80 v2: $03 v3: $00 Confusingly, the “revision 2” ROM has version byte $03 and “revision 3” has $00. The filenames may not reflect the actual revision order — kernal-20-3 might actually be an earlier or alternate build.
Code insertion at $EF5C: STOP key check (+5 bytes) The biggest functional difference. At the start of the parallel LOAD path, v3 inserts: EF5C JSR $FFE1 ; STOP - check RUN/STOP key EF5F BNE $EF5C ; loop if not pressed EF61 BEQ $EF2E ; if pressed, abort v2 has no STOP key check here — it jumps straight into the transfer. This 3-instruction insertion (5 bytes) shifts all the code that follows by 5 bytes, which accounts for the majority of the single-byte differences (they’re all branch targets and jump addresses adjusted by +5 or +6 to compensate for the shift).
Parallel handshake: SEI added at $F841 (+1 byte) v3 adds SEI (disable interrupts) at the entry to the parallel handshake routine. v2 doesn’t disable interrupts. This shifts the code in that block by 1 byte and cascades into further address adjustments.
Parallel transfer timeout: timer-based vs loop-based ($F910–$F968) This is the most interesting technical difference. Both ROMs have a timeout when waiting for the drive to respond during parallel detection, but they implement it differently: v2 (loop-based): F92E LDX #$13 ; outer counter F932 LDA $DD0D ; check CIA2 interrupt flags F935 AND #$10 ; FLAG pin set? F937 BNE $F948 ; yes → drive responded F939 DEX ; no → count down F93A BNE $F932 F93C DEC $A5 ; nested loop F93E BNE $F932 Uses a nested DEX/DEC loop (~5000 iterations) as a timeout.
v3 (CIA timer-based): F931 LDA #$FF F933 STA $DC07 ; Timer B high byte = $FF F936 LDA #$19 F938 STA $DC0F ; Start timer B, one-shot F93B LDA $DD0D ; check FLAG pin F93E AND #$10 F940 BNE $F950 ; drive responded F942 LDA $DC06 ; read timer low byte F945 CMP $DC06 ; compare with itself (has it changed?) F948 BNE $F93B ; timer still running → keep waiting Uses CIA1 Timer B for a hardware-timed timeout. More precise and CPU-independent.
Parallel fallback path: error handling ($F88B) v2: JSR $EE85 → falls into standard IEC byte receive v3: LDA #$00; JMP $EE16 → explicitly loads zero and jumps to a different IEC entry point
Serial LOAD: error recovery ($EFF1) v2: JMP $EFCF — unconditional jump to byte receive v3: BCS $EFD4 — conditional branch on carry, only retries if carry set
Data table pointer at $F0F1 v2: BIT $DD0D (2C 0D DD) v3: STX $DC0C (8E 0C DC) Different CIA register access — v3 writes to the serial port register rather than reading the interrupt flags. This changes how the timer/shift register state is managed after a transfer.
Jump table entries ($F8B1–$F8C9) Several address entries in what appears to be a function pointer table are shifted by +6 bytes, consistent with the cumulative code insertion offsets.
Summary
Change
v2 (your base)
v3
STOP key during parallel LOAD
No check
Polls STOP key
Interrupt disable on handshake
No SEI
SEI at entry
Parallel detect timeout
Software loop
CIA Timer B
Error recovery on serial fallback
Unconditional retry
Conditional on carry
Version byte $FF80
$03
$00
v3 appears to be a more defensive build — it adds interrupt protection, hardware-timed timeouts, and a STOP key escape during parallel transfers. These are the kinds of changes you’d make after encountering real-world reliability issues on certain hardware configurations.
Whether v3 is “better” depends on context. The CIA timer approach is more robust, but the STOP key polling loop at $EF5C is a tight busy-wait that could introduce latency. For the Ultimate64’s emulated parallel port, which is inherently reliable, v2’s simpler approach is probably fine.
Looks like version 2 of the 1541 kernal rom is fine for our use case.
I’m using Claude Code in my work at Automattic all the time. It’s been a huge help in getting through bug fixes and adding new features to the various projects I’m working on. I’ll be posting more about WordPress related goodness soon. Stay tuned.
Well, I have to hand it to Cork City Council. After years of roadworks, diversions, temporary traffic lights, and that perpetual stretch of Patrick Street that looked like a minor archaeological dig, they’ve finally revealed the masterplan and it’s magnificent. They’ve ripped out the tarmac entirely and restored the old channels of the River Lee that ran beneath the city centre for the past 240 years. St. Patrick Street is now navigable by motorboat, and Washington Street has a functioning canal service complete with what appears to be a narrowboat called the Oriel running a shuttle to the courthouse.
Parking signs have been replaced by mooring cleats. The 220 bus route now terminates at a floating pontoon outside Penneys. I’m told that Eason’s is doing a roaring trade in waterproof editions, and a new Dublin Bikes-style scheme called “Cork Canoes” launches next week, but knowing the council, the docking stations won’t be ready for another while yet.
In fairness, they’ve finally earned the title. Cork: the Venice of the North. Truly, the real capital at last.
Happy April Fools’ Day. These images were obviously generated using AI. Cork City Council has not, to my knowledge, flooded the city, but after some winters, nature has a good go at it herself.
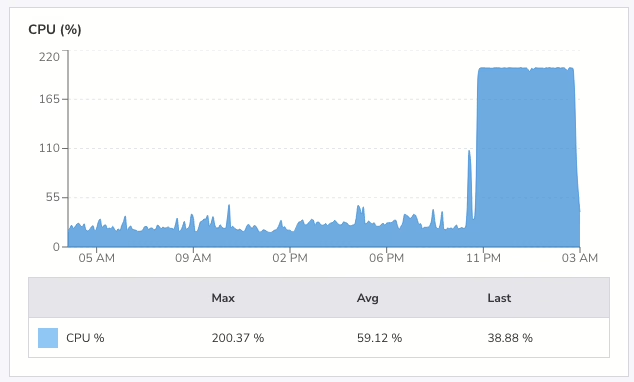
At 4am yesterday morning I was awake. Luckily so, as I checked my email and saw a warning that my VPS had been running at 199% CPU for two hours. I went into my office and checked the logs. Someone had been hammering this site with HEAD requests since just after midnight with nearly 30,000 requests across different URLs in four hours.
If they’d hit the same page repeatedly, cached responses would have handled it. But by requesting thousands of distinct URLs, each request generated a fresh cache file, forcing PHP and the database to do real work every time. My small server was coping, but the load average was high.
I blocked the offending IP in .htaccess immediately. That stopped requests from reaching PHP, but I wanted a proper defence, something that would catch this kind of abuse automatically next time.
I already had Fail2Ban installed. I’d just never configured it for web server attacks. Time to do that.
Fail2Ban works by watching log files for patterns, then banning IPs that match too often. I needed two files: a filter to match Apache access log lines, and a jail to define the thresholds.
First, the filter at /etc/fail2ban/filter.d/apache-ratelimit.conf:
[Definition]
# Matches any request line in Apache access log (combined/common format)
failregex = ^<HOST> -."(GET|HEAD|POST|PUT|DELETE|OPTIONS) .
ignoreregex =
This matches every request in the log.
The jail decides what volume of requests counts as abuse. It lives at /etc/fail2ban/jail.d/apache-ratelimit.conf:
[apache-ratelimit]
enabled = true
filter = apache-ratelimit
logpath = /var/www/logs/access.log
# Triggers a ban after too many requests in a short window
maxretry = 500
findtime = 30
# Ban for 24 hours
bantime = 86400
# Use iptables to drop packets from banned IPs
banaction = iptables-multiport
port = http,https
protocol = tcp
# Allowlist trusted networks
ignoreip = 127.0.0.1
The logic: if a single IP makes more than 500 requests in 30 seconds then ban it for 24 hours. Adjust maxretry and findtime to suit your traffic patterns. Legitimate crawlers and real users won’t come close to these numbers, but an attacker blasting thousands of requests will trip the threshold fast. These are not the numbers I’m using.
The ignoreip directive keeps trusted networks (monitoring services, your own IPs) from getting caught.
The changes to Fail2Ban are activated with the following command (as root):
systemctl restart fail2ban
And I verified it was running by checking the status:
fail2ban-client status apache-ratelimit
Within a couple of minutes, the offending IP appeared in the banned list. I checked the access log, and there was nothing more from that IP. The requests weren’t just being rejected by Apache; iptables was dropping the packets before they reached the web server at all. That’s the key advantage over an .htaccess block: banned traffic never touches Apache.
A VPS with limited resources can’t absorb a flood of uncached requests. Caching helps with repeat visits to the same page, but an attacker who rotates URLs defeats that entirely. Fail2Ban shifts the defence from the application layer down to the network layer, where it’s cheap to enforce.
If you run a small site on a VPS, configure fail2ban for your web server. It takes ten minutes and it works.
Anyway, I presume whoever did that attack is reading this post since they seem to like my blog so much. Why did you do it?
Close
Ad-blocker not detected
Consider installing a browser extension that blocks ads and other malicious scripts in your browser to protect your privacy and security. Here are a few options.
uBlock Origin is a free, open source, ad blocker for your browser.
Use pi-hole if you have a spare Raspberry Pi on your network.
Set the private DNS settings on your phone to dns.adguard.com to block adverts and trackers.